پروژه ربات تشخیص مانع با آردوینو و سنسور مافوق صوت
در این پست از پروژه های الکترونیک پروژه ربات تشخیص مانع با آردوینو و سنسور مافوق صوت را برای شما در نظر گرفته ایم.
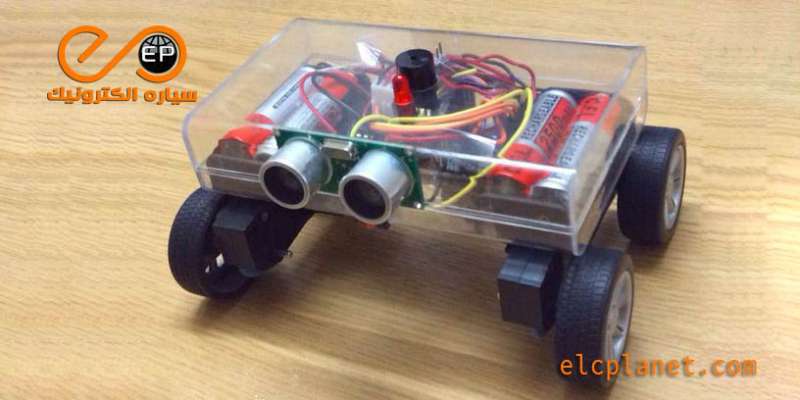
در این پروژه می خواهیم یک ربات کوچک سونار با آردوینو پرو مینی ایجاد کنیم. سنسورهای سونار یا التراسونیک بر اساس یک اصل مشابه با رادار یا سونار کار می کنند؛ که ویژگی های یک هدف را با ارزیابی پژواک امواج رادیویی یا صوتی به ترتیب انجام می دهند. سنسورهای التراسونیک فعال ، تولید امواج صوتی با فرکانس بالا را انجام می دهند و پژواک آن را که توسط حسگر دریافت می شود، اندازه گیری می کنند. فاصله زمانی بین ارسال سیگنال و دریافت پژواک تعیین می کند که فاصله تا یک شی چقدر است.
در این مدار از یک حسگر HC-SR04 که یکی از ارزان ترین قیمت ها در این نوع است استفاده شده است. این سنسور دارای 4 پین است که دوتای آنها تغذیه و دوتای دیگر ورودی و خروجی هستند. مکانیزم آن ساده است؛ ارسال امواج و دریافت پژواک آنها.
تصاویر مدار و مراحل انجام کار کاملاً روشن و گویا هستند. در این ربات از یک آردوینو پرو مینی 5 ولت و IC L293D جهت درایو موتورها استفاده شده و به منظور زیبا سازی کار، led و اسپیکر هم مورد استفاده قرار گرفته اند.
عملکرد ربات جذابیتهای خاصی دارد؛ مثلاً پس از شروع حرکت، با توجه به توابع random که در کد برنامه استفاده شده است، عملکردهای جالب و اتفاقی مانند توقف یا پخش موزیک انجام می شود؛ همچنین در صورت نزدیک شدن ربات به موانع، حرکت آن متوقف شده و پس از بازگشت ربات، جهت دیگری به صورت تصادفی انتخاب شده و ربات مجدداً در جهت جدید شروع به حرکت می نماید.
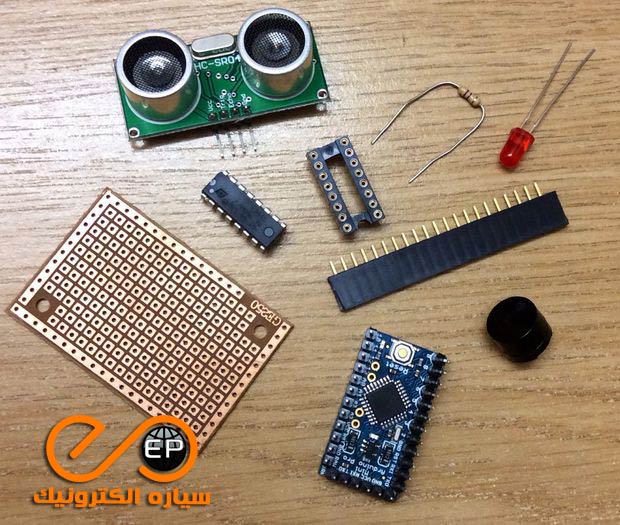
قطعات الکترونیکی مورد استفاده در پروژه ربات تشخیص مانع با آردوینو :
- 1 عدد آردوینو پرو مینی
- 4 عدد باطری قلمی + جا باطری
- 1 عدد بلندگوی کوچک ( بیزر )
- 1 عدد LED
- 1 عدد حسگر مافوق صوت SR-04
- 1 عدد مقاومت 470 اهم
- 1 عدد آی سی L293D
- 1 عدد سوئیچ
- 2 عدد موتور DC ساده
- مقداری پین هدر و کابل
قطعات مکانیکی مورد استفاده در پروژه ربات تشخیص مانع با آردوینو :
- 2 عدد گیربکس اسباب بازی دو چرخ
- 1 جعبه پلاستیکی
- چسب فوری
مونتاژ ربات تشخیص مانع با آردوینو
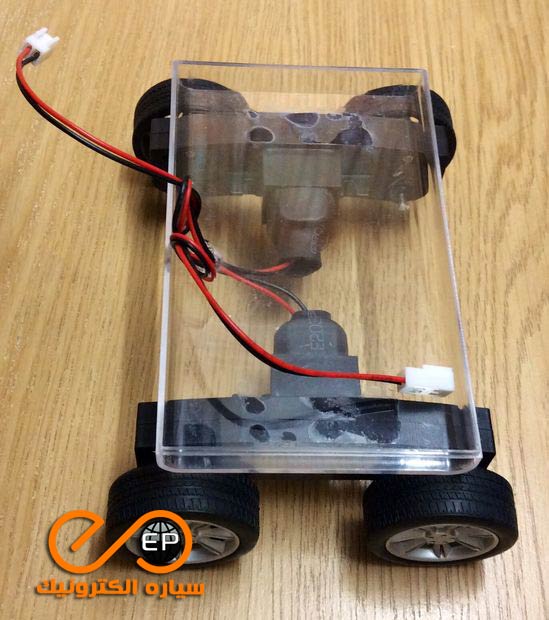
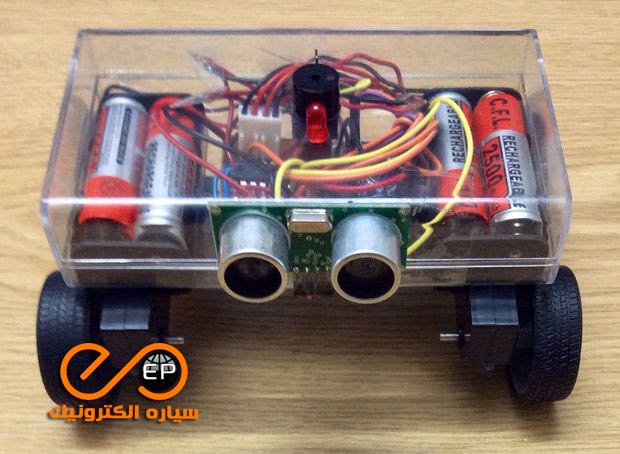
مرحله 1: مونتاژ بدنه ربات

یک جعبه پلاستیکی را پیدا کنید تا بتوانید گیربکس را روی آن سوار کنید. می توانید از جعبه های پلاستیکی گز یا سوهان استفاده کنید. قطعات را همانطور که در تصویر نشان داده شده است به جعبه وصل کنید.
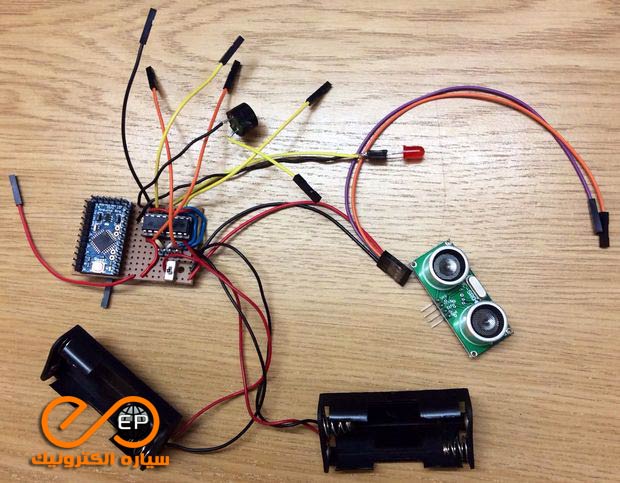
مرحله 2: مونتاژ قطعات الکترونیکی مدار
طبق نقشه زیر قطعات و سیم کشی مدار را انجام دهید.
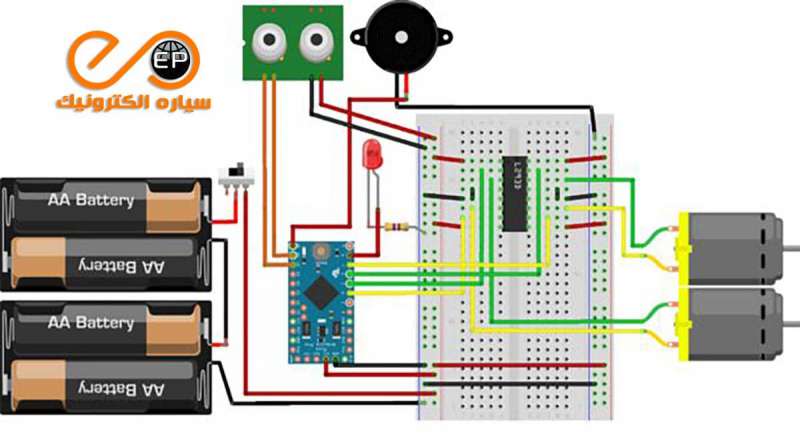
برد آردوینو را توسط پین هدر ها به برد سوراخ دار متصل کنید و آی سی L293D را روی برد سوار کنید. سپس سیم کشیهای داخلی و خارجی برد را انجام دهید. در هنگام چیدمان قطعات در بدنه ربات می توانید مطابق سیلقه خود عمل کنید. قطعاتی مثل LED و Buzzer .
مرحله 3: کدهای برنامه
کد زیر مثال ساده و مناسبی است از پیادهسازی رفتارهای متفاوت در زبان C برای اجرا بر روی Embed System هایی که دارای حافظه و قدرت پردازشی محدود هستند (مانند Arduino). با توجه به محدودیت های موجود، کد مورد استفاده باید تا جای ممکن ساده و دارای پیچیدگی زمانی کمی باشد.
حالات تقسیم state ها و استفاده از متغیرهای selector ، امکان سوئیچ کردن بین رفتارهای متفاوت را به سادگی فراهم می کند.
نکته: کتابخانه NewPing به همراه حسگر sonar ارائه میگردد.
در ادامه می توانید کدهای برنامه را در فایل تکست زیر دانلود و مشاهده نمایید:
حجم فایل: 2 کیلو بایت

موفق و پیروز باشید…
سلام میتونم از برد nano ch340 استفاده کنم؟ و چرا برنامه که دادین خطا داره؟
ممنون میشم راهنمایی بفرمایید.
سلام. من این پروژه رو نساختم و متأسفانه اطلاعی از کار کرد اون ندارم.